El secador de manos
Estos están provistos con una barrera de luz, a través de la cual se puede conectar y desconectar el ventilador.

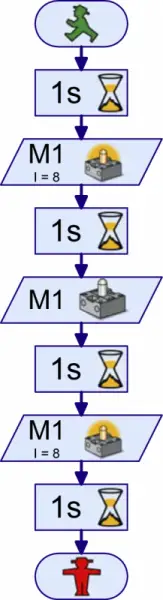
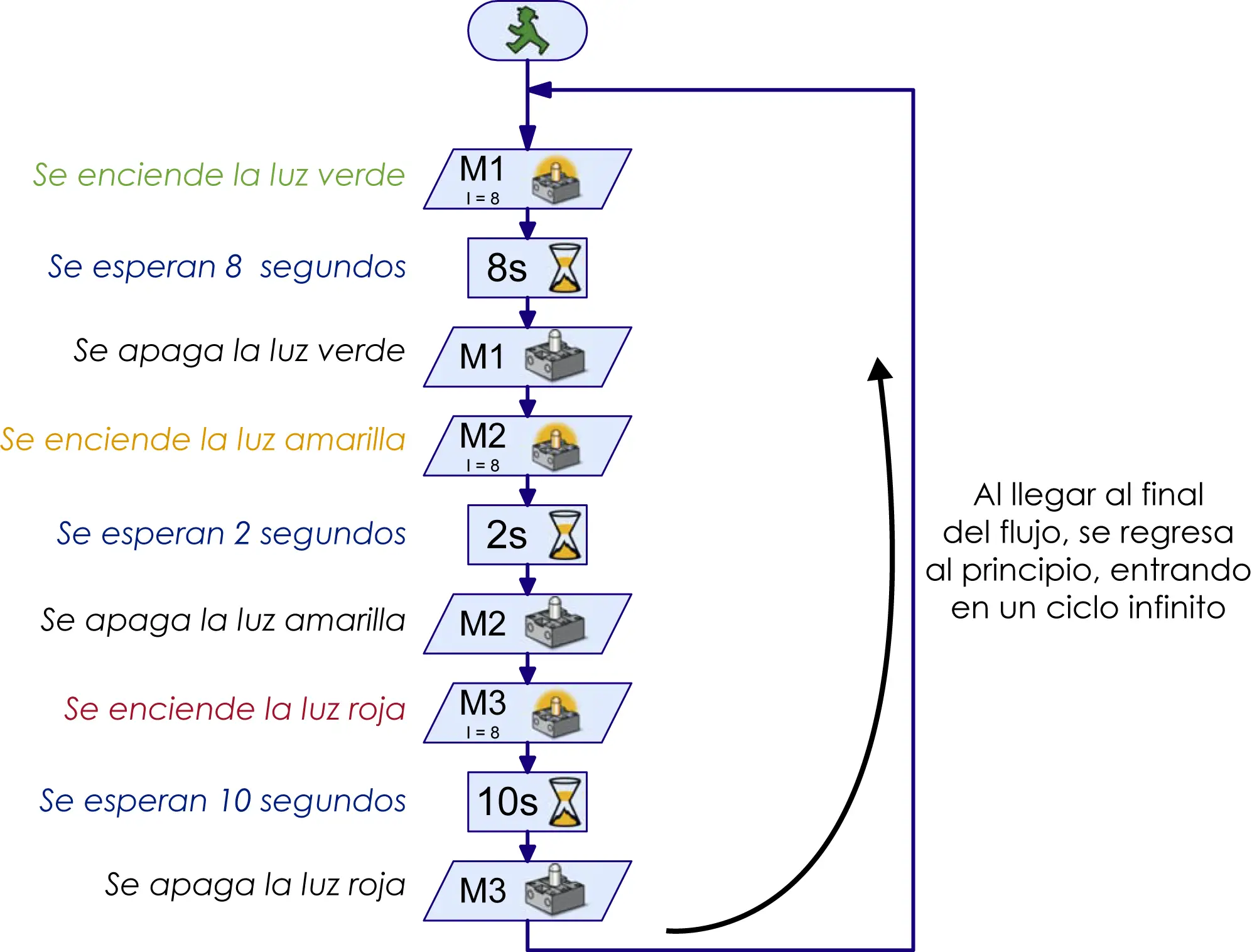
El Semáforo
El semáforo en principio debe estar en verde. Cuando un peatón oprime el pulsador I1, el semáforo 3 segundos más tarde tiene que pasar a ámbar y tras 4 segundos a rojo. La fase roja debe durar 10 segundos, la fase roja-ámbar que sigue a continuación, 3 segundos. Entonces debe volver a estar verde.

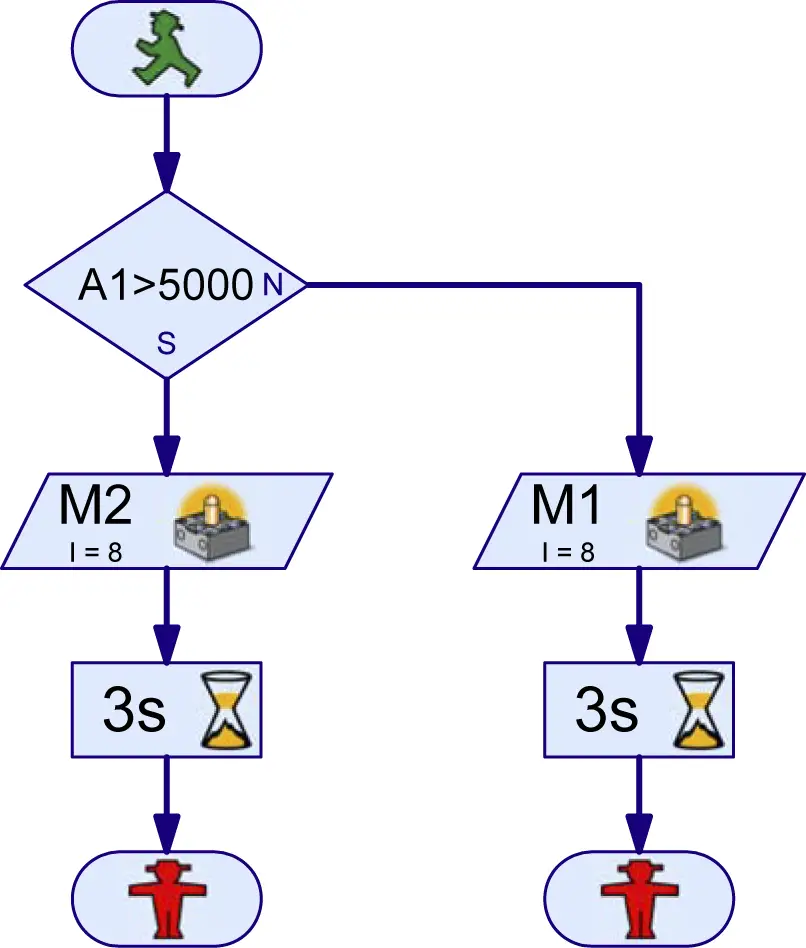
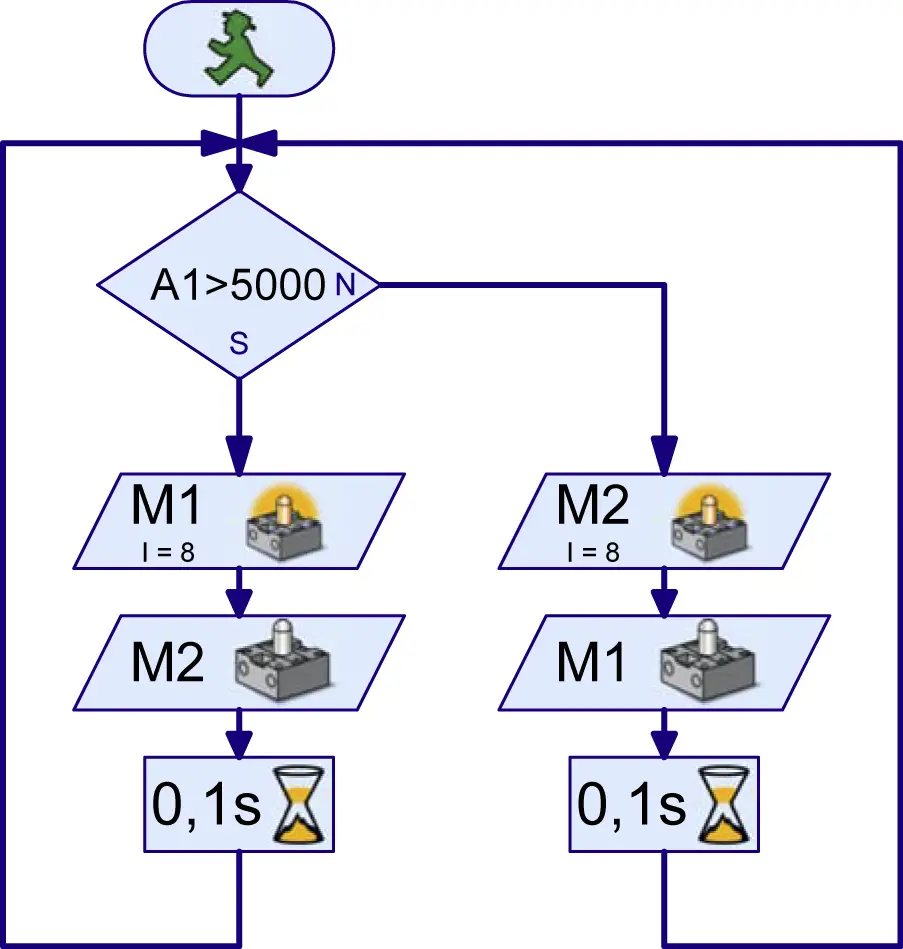
Robot Rastreador
Con este modelo queremos descubrir conjuntamente, como se puede controlar un robot móvil. ¿Cómo se logra ponerlo en movimiento, cómo funciona la dirección y se puede quizás mejorar aún su exactitud? Estas preguntas se responden con ayuda de las tareas en este capítulo. Pero primero naturalmente debes montar el robot. La descripción la encontrarás como siempre en las instrucciones de construcción. • Monta el robot tal como está descrito en las instrucciones de construcción. • Tómate tu tiempo para el montaje. Mira detenidamente los planos en las instrucciones de construcción, también el cableado. Si combinas los elementos con el ROBO TX Controller de manera diferente a lo descrito en las instrucciones de construcción, posiblemente el robot se comportará diferente a lo que tú esperas.