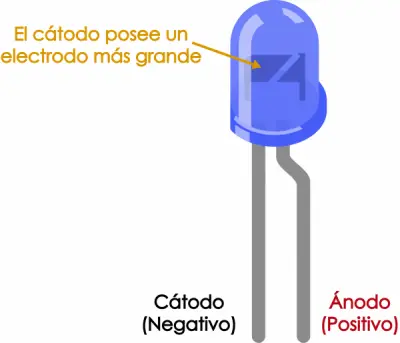
Debemos recordar que para poder desarrollar estos ejemplos debemos alimentar el RTC con su batería y mantenerlo conectado a la PC. También debemos tomar en cuenta que un LED posee polaridad y que no podemos conectarlo de cualquier forma.
El cable negro es el cable que hemos utilizado para la conexión al negativo o ground (GND). El rojo es el que hemos conectado al positivo, el cual obtendremos a partir de una salida digital (en este caso, O1/M1). Ahora vamos a “dibujar” el siguiente diagrama en nuestro software RoboPro.
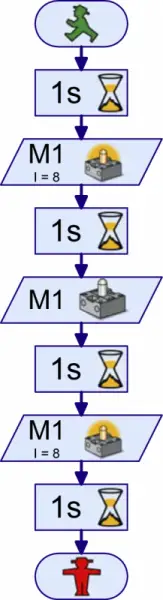
Diagrama 2
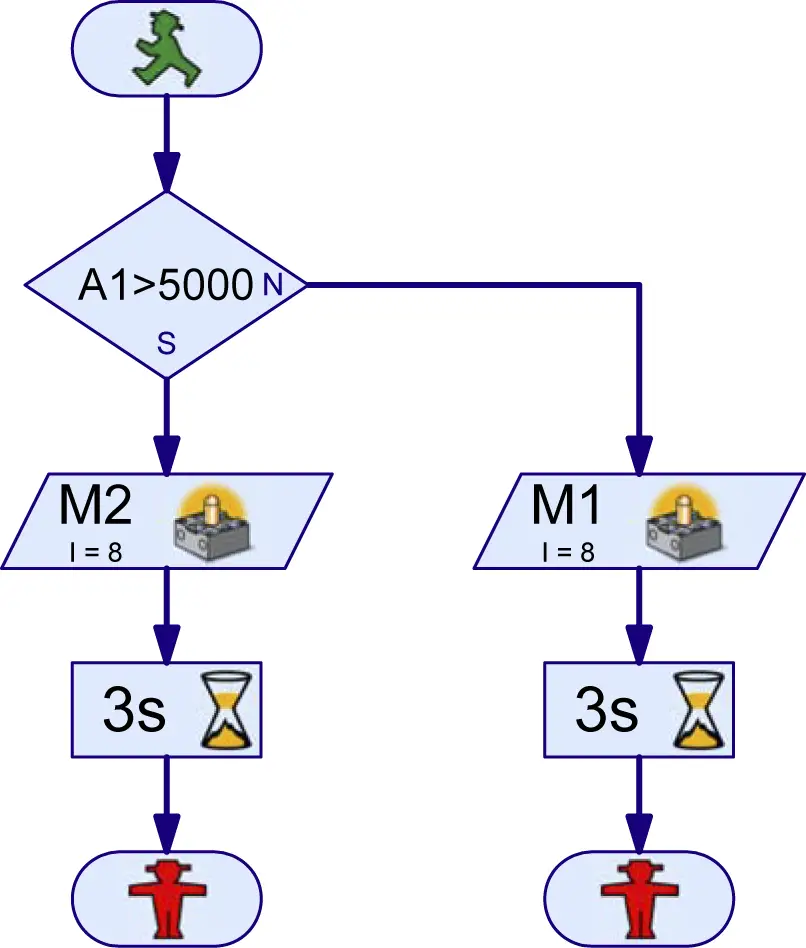
El funcionamiento que le otorgaremos a este circuito nos permitirá encender el LED rojo si la posición del potenciometro se encuentra en uno de los extremos. Si movemos la perilla al extremo opuesto, entonces se encenderá el LED verde. El encendido durará 3 segundos en cualquiera de los 2 casos y luego el programa llegará a su final. Para ello utilizaremos el siguiente diagrama de flujo:
Diagrama 3
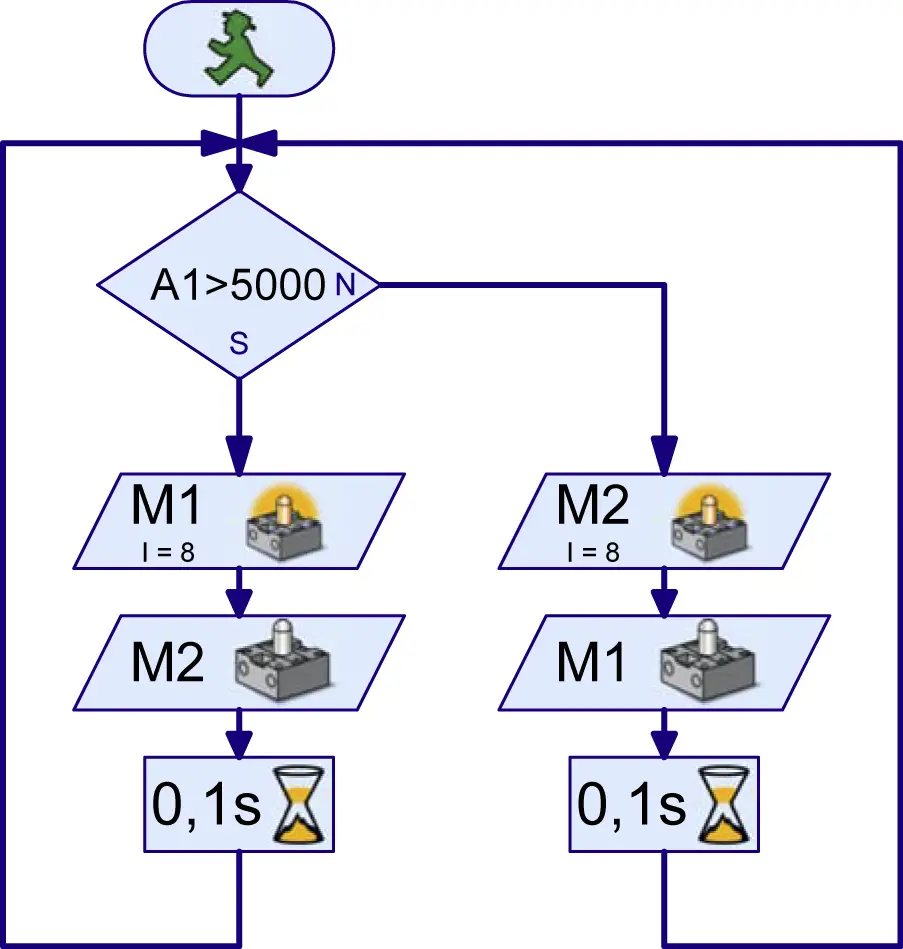
Hemos reemplazado el potenciometro por un botón. Ahora, en vez de una señal de voltaje variable (analógica) tendremos una señal con 2 estados posibles: encendido o apagado. Si presionamos el botón leeremos un HIGH y si el botón no está presionado leeremos un LOW. El diagrama que usaremos será el siguiente:
diagrama 3 usaremos el siguiente diagrama de flujo:
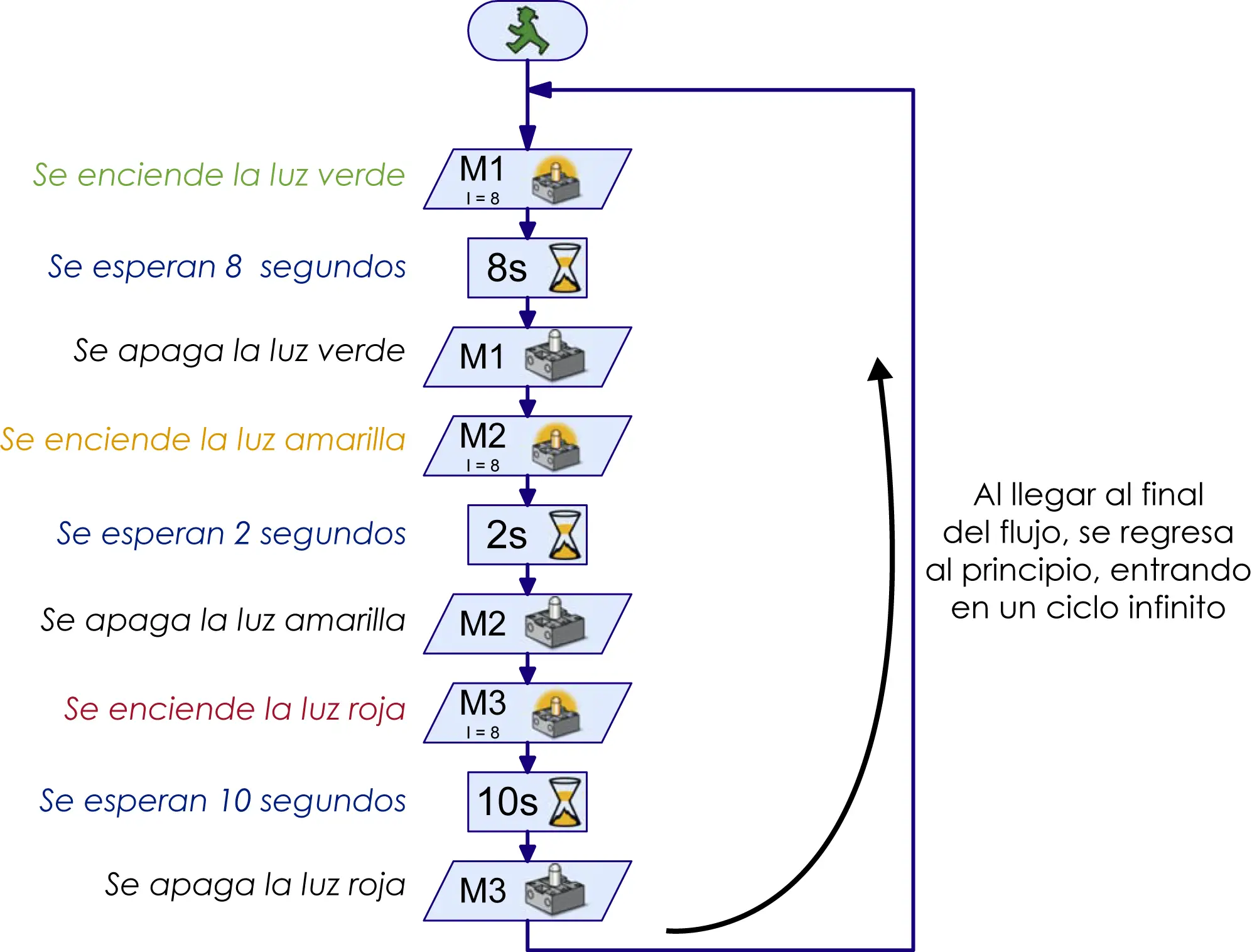
Diagrama 4
Como vemos tenemos los 3 LEDs de las 3 luces asociados a 3 salidas (O1, O3 y O5) del RTC. Para darle funcionalidad utilizaremos el siguiente diagrama:

Excelente me gusto por que tiene todo detallado con sus pasos
ResponderBorrar